
在具身智能浪潮席卷全球的背景下,机器人控制器的性能成为决定其智能化水平的关键。阿普奇具身智能机器人KiWiBot系列控制器,通过创新性的国产化设计与“大小脑”协同控制架构,为高精度运动控制提供了突破性解决方案。

技术迭代:体积与性能双突破
具身机器人对控制器提出了小体积、高性能、高集成、高稳定、高实时、低噪音等严苛要求。阿普奇KiWiBot系列控制器经过三代技术演进,逐步解决了传统控制器的痛点:
第二代控制器在保持X86+Orin架构基础上,实现了型号多样、选型灵活、扩展性强和体积小巧的优势。
第三代控制器进一步优化整体性能,连接器采用车载线束方案,显著提升可靠性。

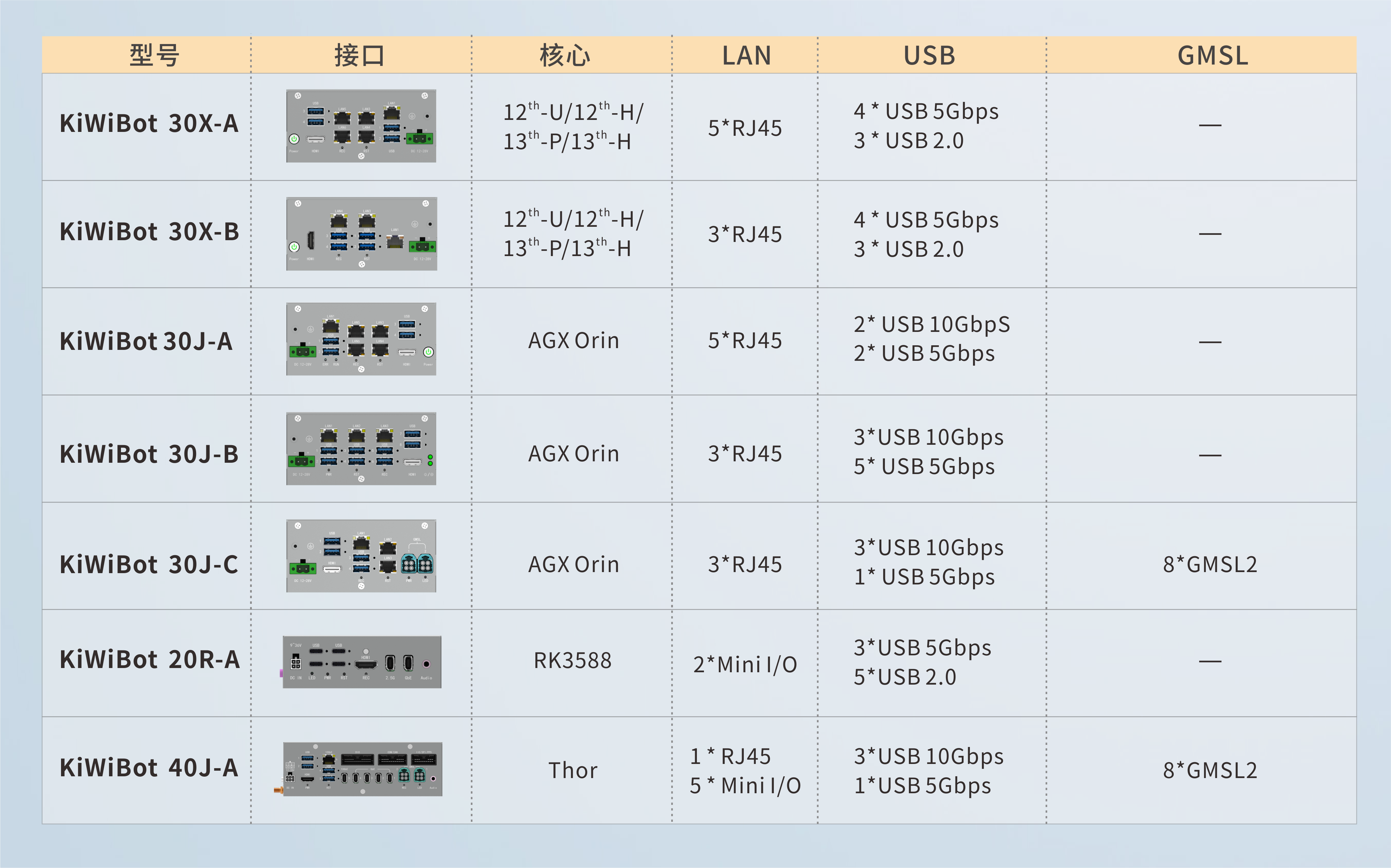
“核心大小脑”控制器型号推荐:
四种安装模式:灵活适配场景
控制器提供四种安装方式,确保在各种应用场景下的最佳适配:
● 带壳安装:增强结构强度与抗冲击能力,提升环境防护性能
● 不带壳安装:巴掌大小理想尺寸,三重散热系统保障静音稳定运行
● 并排安装:结构坚固,维护便捷
● 堆叠安装:高度集成,节省空间,适合空间受限场景
全系列采用工业级设计,具备优异的环境适应性与扩展灵活性。

核心优势:赋能精准运动控制
该控制器的核心优势体现在卓越的实时性能与精确的时间同步能力,为高精度运动控制提供关键支撑。无论是在移动机器人、工业自动化还是特种应用中,均能保证稳定可靠的运行表现。
其具备强大的电磁兼容(EMC)与抗干扰能力,结合优良的抗振动性能,确保在复杂电磁环境下稳定运行。模块化设计实现各部件独立工作,显著提升系统可靠性与可维护性。

随着机器人产业向高精度、柔性化方向发展,运动控制架构正经历从集中处理向分布式协同的重要演进。阿普奇KiWiBot控制器通过国产化设计与”大小脑”协同架构创新,不仅解决了高精度控制难题,更为产业提供了自主可控的技术底座,为中国在全球具身智能竞争中开辟了新的技术路径。
发布时间: 11-14-2025


