
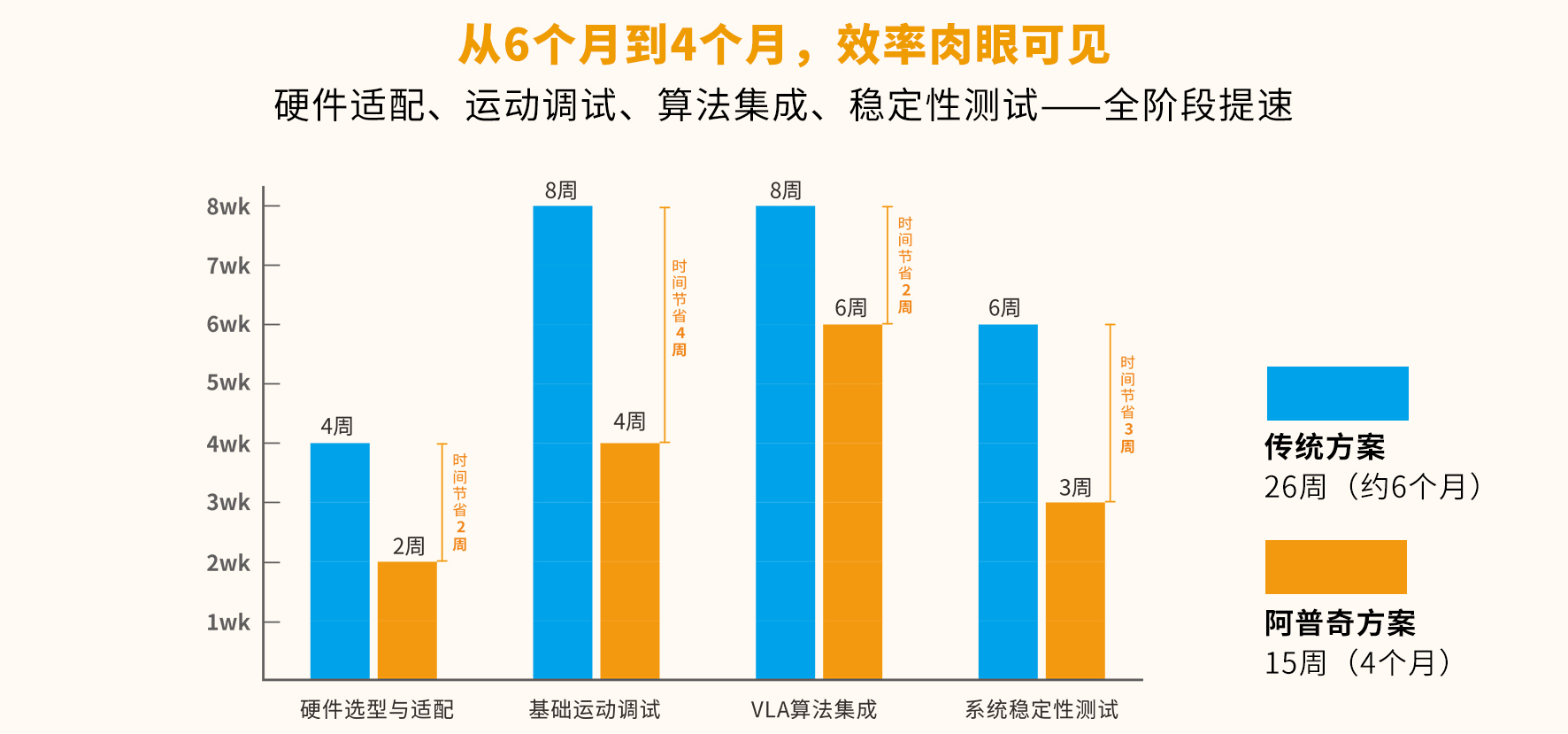
2025年10月至2026年1月,某国内头部人形机器人集成商与阿普奇深度合作,基于AGX Orin + Intel“大小脑”协同架构,在短短4个月内完成新一代双足人形机器人样机的开发与调试,整体开发周期较传统模式缩短40%。

客户背景与核心挑战
客户简介
国内领先的双足人形机器人研发与集成企业,专注于高端仿生机器人领域,产品覆盖科研教育、特种作业、商业服务等多个场景。
核心痛点
- 开发周期过长:传统方案中,运动控制、环境感知、决策规划等模块由不同供应商提供,集成调试耗时长达8–12个月。
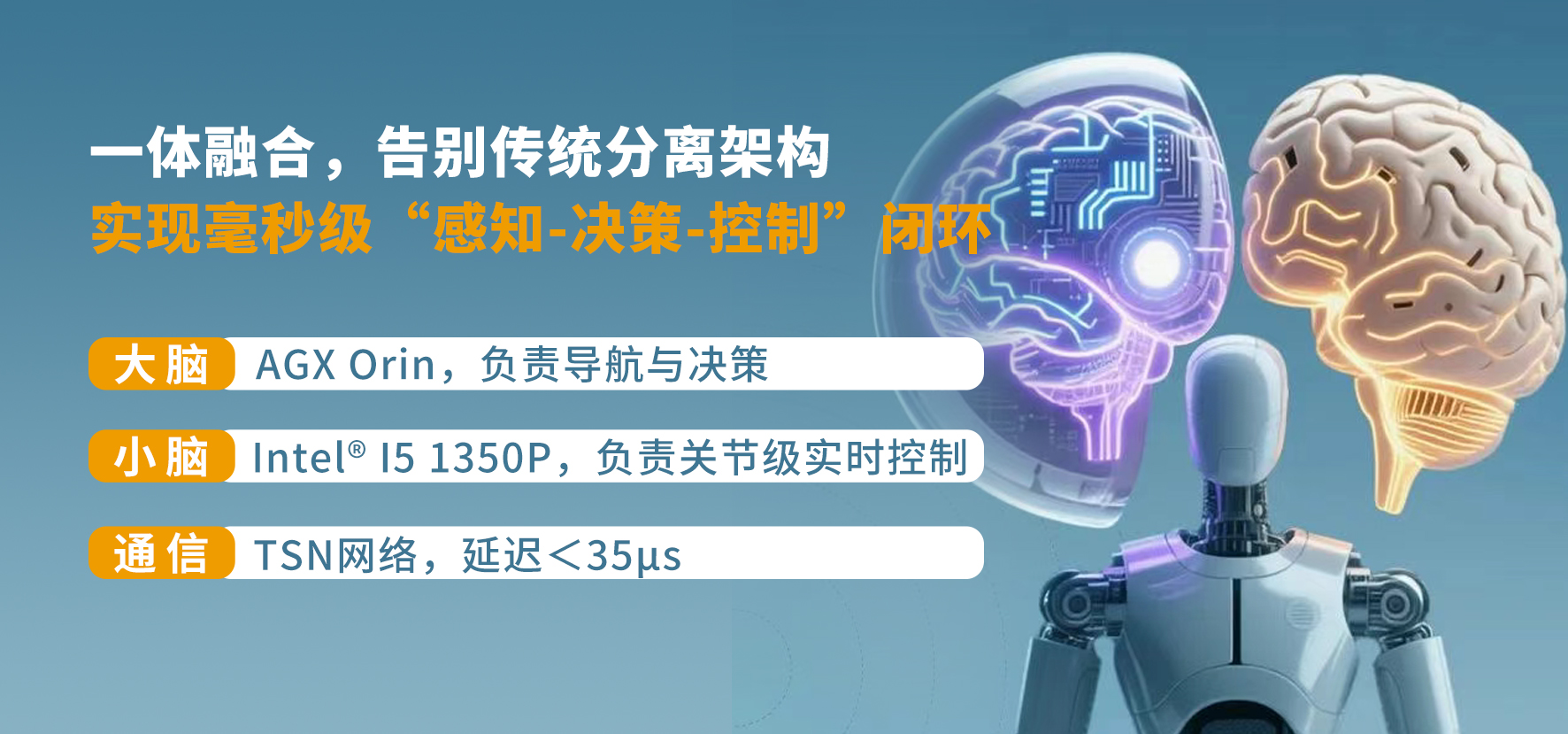
- 系统协同困难:双足机器人需要“大脑”(决策)与“小脑”(控制)实现毫秒级协同,传统分离架构难以支撑实时平衡与多模态感知的高效交互。
- 算法迁移成本高:从仿真到实机的算法移植与优化,常需重复适配不同硬件接口,拖慢整体进度。

阿普奇解决方案:AGX Orin + Intel“大小脑”协同架构
1. 方案设计阶段(2025年10月)
需求对齐:
- 共同梳理13项核心需求,包括实时步态控制频率≥1kHz、多传感器同步精度≤40μs、支持ROS 2与自定义中间件双模式等。
方案定制:
- 主控层采用AGX Orin + Intel大小脑融合控制器,集成x86高性能决策单元与实时控制单元,实现“感知-决策-控制”一体化。
- 执行层部署Intel I5 1350P作为关节协处理器,负责28个关节的伺服控制与本地自适应调节。
- 通信基于千兆TSN(时间敏感网络),确保AGX Orin与x86小脑间延迟<35μs。
2. 快速部署阶段(2025年11–12月)
- 硬件即插即用:标准电气接口直接适配客户现有伺服驱动器与传感器,减少线缆定制时间。
- 软件开箱即用:预装Ubuntu 22.04与ROS 2系统,内置双足机器人基础功能包,客户3天内即完成基础运动配置。
- 高效协同调试:阿普奇提供“现场+远程”双线支持,快速解决传感器标定等难题,大幅减少现场调试时间。
关键成果:开发周期缩短40%
开发时间线对比
- 控制实时性:步态控制周期从5ms提升至1ms,动态平衡响应速度提高80%。
- 开发效率:算法迭代速度提升,客户可在7天内完成新步态的仿真-实机验证(传统需20天)。
- 系统稳定性:连续72小时负载测试无故障,MTBF(平均无故障时间)提升至1000小时。
2.标准化创造价值:硬件接口与软件中间件的标准化,可大幅降低集成复杂度。
3.生态协作新模式:供应商应向“解决方案伙伴”转型,深入参与客户早期开发。
- 融合架构:AGX Orin + Intel大小脑实现决策与控制硬件层面统一,避免数据总线瓶颈。
- 弹性扩展:支持从12关节到32关节的不同构型,小脑性能可升级至I7 13700H。
- 开放生态:全面兼容ROS 2、MATLAB/Simulink等主流开发环境。
- 全周期陪伴:从方案设计到量产支持,提供联合开发服务。
- 经验共享:基于超50个机器人客户的成功开发经验,助力客户快速推进。
- 快速响应:7×24小时远程诊断 + 48小时现场支持,保障项目顺利落地。

在机器人产业化加速的今天,开发效率已成为竞争的关键。阿普奇通过“大小脑”协同架构与深度服务,不仅助力客户实现开发周期缩短40%,更验证了一体化设计在复杂机器人系统中的重要价值。我们期待与更多伙伴携手,共同推进具身智能时代的到来。
发布时间: 01-12-2026


